In this post, we will derive the kurtosis of stand Gaussian distribution
![]()
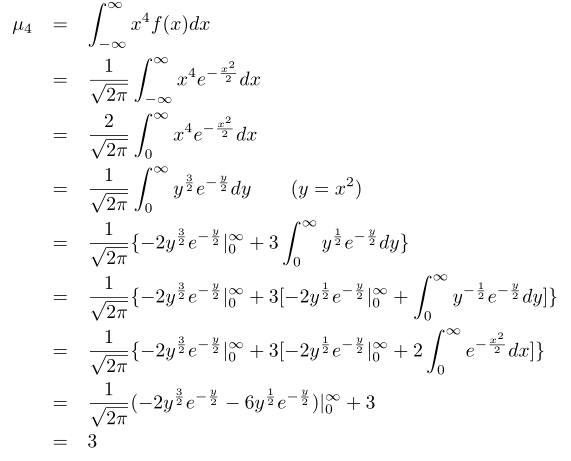
is 3. We use the following equation to calculate the fourth central moment

The fourth central moment is
Therefore, the kurtosis is

For an application of Kurtosis analysis in saliency detection/in-focus segmentation, please refer to our paper and source code.
